严新平院士:我国新一代航运系统控制体系建设的思考
文章整理自第十七届中国智能交通年会(ITSAC 2022)暨2022中国智能交通大会。
报告人:严新平 中国工程院院士、武汉理工大学智能航运与海事安全国际科学技术合作基地主任
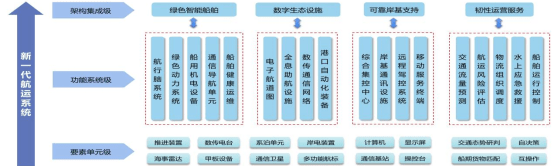
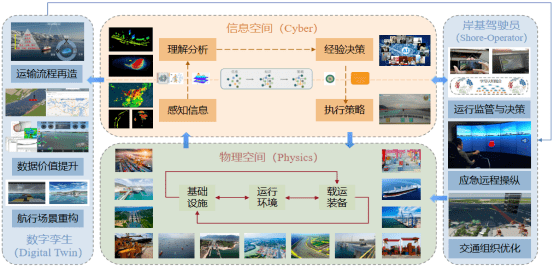
在2021年,我们团队提出了“新一代航运系统”的建设构架,新一代航运系统是在大数据、云计算、AI发展下,在智能交通引领下的一种智能航运新业态,由绿色智能船舶、数字生态设施、可靠岸基支持和韧性运营服务等四部分独立运作而又随机关联的组件、要素和系统适时交互、协同作业。这是新一代航运系统未来至关重要的体系特征。
未来船舶要实现“岸基驾控为主、船端值守为辅”的运行模式。目前,航运系统与其他的交通工具存在很大的差异,船舶主要是依靠船端的船员进行操控,安全高效地实现人员出行和货运位移的目的。新一代航运系统将以“岸基驾控”为主,船员只在关键时刻或者必要的时候进行接管。
比如:船舶机舱控制室,主要对船舶动力设备和其他辅助设备做管理,一般由船员值守;随着未来远程运维技术的发展,可以将船舶机舱集控室(ECR)转移到岸基机舱集控中心(ECC),实现远程智能运维。通过岸基集控中心控制航行船舶,提升安全性和效率,为未来船舶远程操作控制系统提供样板。
关于智能航行,国内外相关机构开展了一系列实验。2018年,英国罗尔斯·罗伊斯公司与Finferries在芬兰图尔库市以南群岛展示了全球首艘无人驾驶渡轮,总长53.8米的“Falco”号船完成了无人驾驶航行,并在遥控操作下顺利返航。该船搭载了多种传感器,这中间还包括CCTV的感知阵列、GPS和雷达等。它在两个岛之间实现了8个点的寻迹航行,自动规避部分障碍物(例如前方来船等),回程的时候实现了岸基远程操控。这是最早运用远程驾驶实现船舶智能航行场景的探索。

韩国也开展了相类似的试验研究。2020年,韩国三星重工开展了一艘38米长、300总吨的拖轮自主航行和远程驾驶试验;港作船在大型船舶进出港时可发挥辅助作用,所以他们选择38米的港作船作为自主航行以及远程驾控试验对象。实际上,船舶航行场景较汽车驾驶场景简单多了,但是在水动力作用下船舶是六自由度的运动体,使得船舶的操纵难度大于与其他交通运载工具。

2021年,挪威Yara公司与Kongsberg技术公司联手打造的世界上第一艘电动和自行式集装箱船Yara Birkeland已在奥斯陆峡湾进行首航。这艘船最初设计的目的是分摊部分道路运输货物到水运,实现从货物的装卸到船舶航行全程的自动化。由于疫情原因,该船于2021年才投入营运;目前,该船自主航行相关的功能还在调试之中。

2020年,比利时SEAFAR公司在一艘135米的驳船Zonga号进行了远程驾驶过闸试验,融合船端、岸基等多源信息,实现协同感知;岸基控制中心实时集成分析船舶运作状况,具有管理和操作多条船舶功能。2021年,比利时SEAFAR公司又在集装箱船Deseo实现了由泽布吕赫港到安特卫普港的全航程远程操作。上述实验和示范应用,为我国船舶远程驾控与自主航行技术探讨研究提供了借鉴。

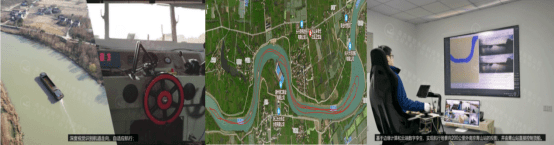
在科技部国家重点研发计划项目的支持下,我国也开展了船舶智能航行相关领域的研究工作。武汉理工大学团队研发了基于“航行脑”的船舶智能驾驶系统,以内河集装箱船等为对象,开展了船舶远程驾驶系统的功能需求算法开发、测试能力验证。
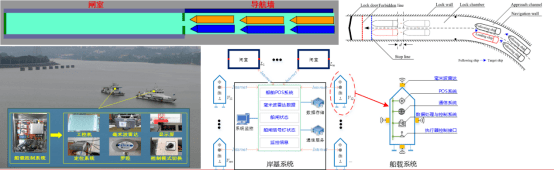
在国家自然科学基金项目的支持下,为了逐步提升三峡和葛洲坝船舶过闸的效率,武汉理工大学团队研发了船舶编队过闸船岸协同控制系统,实现了领航船航速自动控制、跟随船距离保持自动控制、闸室自动停船控制等功能。2019年6月至11月,在三峡-葛洲坝船闸水域开展了多次船舶编队协同过闸测试,探讨提高通航枢纽多船过闸效率的方法。
目前,国内外相关研究机构都在开展智能航行的研究工作。通过上述实践与示范应用,我们大家都认为控制管理系统是建立新一代航运系统最重要的核心;假如没有一套健全、可靠的控制管理系统,很难实现新一代航运系统的新业态。
我国90%以上的外贸,战略性物资中85%煤炭、75%原油、70%矿石、60%LNG都是依靠航运实现的。同时,我国货运周转量的53%也是通过水运实现。航运对于保障产业链和供应链的安全,尤其在疫情背景下发挥了至关重要的作用。
长江连续多年成为全世界内河运输最繁忙、运量最大的黄金水道。长江经济带覆盖上海、江西、湖北、湖南等11省市,占全国21.4%,GDP超全国40%。2021年,长江干线省市水路客运量1.1亿人次,货运量59亿吨,其中内河货运量33.9亿吨。我国是绝对的水运大国,目前世界港口吞吐量排名前10位中有8个在中国。
《交通强国建设纲要》提出“船港装备智能控制,大数据、互联网、人工智能赋能的智能航运等”,《综合立体交通网规划设纲要》也特别提到:到2035年建成“四纵四网两网”的国家高等级航道2.5万公里,建设赣粤、湘贵、平陆三大运河系统。基础设施的建设给未来航运提供了很好的条件,也为新一代航运系统实践提供了良好的场景。
一、装备运行控制,最重要的包含港口装备、通航枢纽设备、船载设备、船舶航行控制。
在上述三方面中,我国在很多领域都处于国际跟跑状态;唯有港口设备与运行,特别是集装箱自动化码头,我国是国际领先的,上海、青岛、天津、厦门等港口都实现了集装箱码头自动化,散货码头实现自动化还有很大的距离。
在新一代航运系统控制体系中,感知、通信、决策和应急都是很重要的水路交通控制基础,其核心组件与模块严重依赖进口,软硬件缺乏自主创新。船舶交通管理系统(VTS),80%都是进口。另外,我国虽然是一个造船大国,但船载动力控制系统、通信导航系统,大部分都是依靠专利品牌产品在我国生产,搭载在各种船上。亟需研发新一代航运系统的核心控制装备与系统,实现自主可控。
综合大量国内外的文献和应用案例分析,水路交通系统控制正面临着“技术变革”。比如:水路装备的运行控制,已经从传统的单体控制向联网的网络控制转变;水路交通运输状态控制,已经从局部水域控制向广域协同控制转变;水路交通的安全控制,已从事故被动响应向全过程主动控制转变。新一代航运系统控制体系要逐步从以“人”为主的弱控制向以“系统”为主的强控制演变,实现数字表达化、决策智能化、控制网络化和运行自主化。亟需创新新一代航运系统控制的新原理、新方法,抢占未来技术高地。
国际上,美国、欧洲、日本都在这方面做了一些布局,并开展了核心关键研发技术。美国主要聚焦于交通感知、通信和救助设备核心技术,欧洲主要是航运装备、航海数据服务、智能航行核心技术,日韩主要是智能航行核心技术。
新一代航运系统的控制对象包括船舶及船载装备运行控制、水路交通系统状态控制、水路交通安全控制等三方面。
新一代航运系统控制体系的技术架构,包括了数字基础平台(一图一网)和4个重要系统。
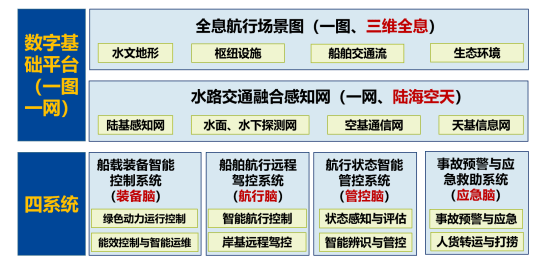
数字基础平台包含了“一网一图”,最重要的是如何建立自主的海图制图标准,而不是受制于其他几个国家或者组织。另外,多源的数据采集、处理及规范化表达,特别是通讯组网困难的场景。因此,建成自主可控的水路交通数字基础平台,是解决新一代航运系统高可靠性采集、传输和处理卡脖子等难题的重要前提。
“一图”是指全息航行场景图。它能够给大家提供远程驾控自主航行高精度导航信息,不仅有各种水文信息,基础设施的状态信息,以及船舶交通流信息,其他的还有包括了生态保护、通航环境相关的信息。
“一网”是指水路交通融合感知网。通过陆基、水面水下探测、空基和天基的构成,为水路交通平行管控和海事监管提供更好的技术支撑。
船载装备智能控制管理系统需要攻克运作时的状态在线监测技术、使役性能衰退预警技术、数字孪生与智能决策技术,研发健康管理与智能运维系统、能效调控系统和船舶排放监测与控制装备,提高船载装备的可靠性和绿色化水平。
船舶智能航行控制管理系统,面临着航行环境复杂、人机交互不强、运动控制困难等挑战,最终要建立船岸协同驾控系统和智能航行控制管理系统,实现内河、沿海和远洋船舶智能航行的技术引领。
航行状态智能管控系统要解决态势理解能力低、对象协同水平系统弱、系统联动响应差等难题,需研制高精度海事信息服务装备和广域协同交通智能管控系统,实现新一代航运系统的海事管控模式的变革。
水路交通安全应急救助系统,主要应对目前“看不清、靠不近、救不下”的难题。通过研发广域事故救助指挥系统、人员撤离与货物转运系统和大吨位沉船打捞装备等,进一步提升新一代航运系统安全事故人命-财产-环境救助效能。
我国新一代航运系统的控制体系建设,将有利于我国水路交通系统运输效率、安全性提升;推进我国航运业的人员从业模式与环境的变革;实现我国船岸协同驾控技术引领世界发展方向。
我国新一代航运系统的控制体系建设,急需解决新一代航运系统的控制架构设计、控制模式研究、控制设备研制和控制标准制定等问题,需要从技术突破、装备研发、标准规范制定等方面同步推进。
因此,希望有更多从事智能交通领域研究的同仁,能热情参加新一代航运系统建设与研究工作,为我国水路交通智能化、绿色化和韧性化发展贡献力量。
